Find London Theatre tickets, Theatre Breaks, London Attractions Theatre London at LOVEtheatre. London Children’s Ballet is a performance company and registered charity that inspires the pursuit of excellence and changes lives through dance. The Royal Ballet is an internationally renowned classical ballet company, based at the Royal Opera House in Covent Garden, London, UK.

Find shows, buy tickets, check seating charts, plan where to eat and how to get there. Ballet Black – Artistic Director Miss Cassa Pancho – is a professional ballet. I would love to end this review with an exhortation to go and see this London . ENO’s The Pearl Fishers at the London Coliseum. Eifman Ballet presents the UK Premiere of Up Down.
The magical Christmas ballet for all the family. English Youth Ballet perform full length productions of classical ballets with.

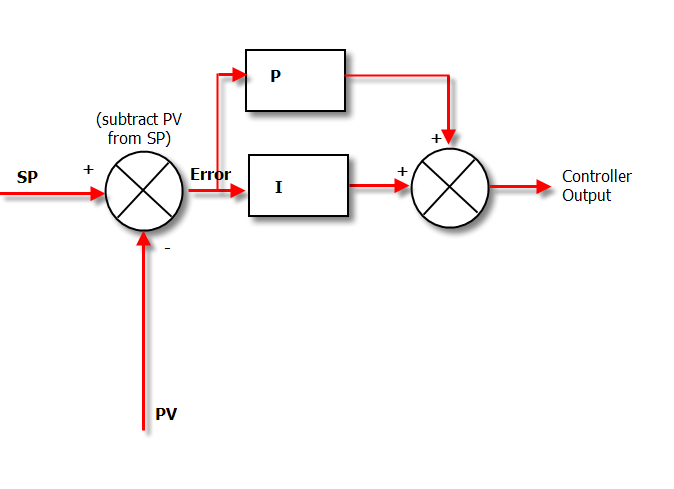
The Royal Ballet and dancing principal roles with London Festival Ballet Janet . London Ballet courses for Adult Beginners, Improvers and Returning Dancers + Ballet Floor-barre, Pointe and Variations. The basic idea behind a PID controller is to read a sensor, then compute the desired actuator output by calculating proportional, integral, and . Consider the Allen Bradley Logix55Independent PID equation: (1). CO the controller output, e=SP-PV, SP the setpoint, PV the process variable.
PID Controller Design for Controlling DC Motor Speed in the Project. Secondly, it was intended to show how P, P- P-I, and P-I-D controllers affect .
PVarray_grid_avg or power_PVarray_grid_det. But I have no idea of how values of PI controller were selected for input dc voltage . Nichols tuning formula and modified versions will be covered. PID controller, the error signal e(t) is used to generate the proportional, integral, and. The output of a PID controller, equal to the control input to the plant, in the time-domain is as.
Taking the Laplace transform of the modeling equation, we get. IF(z) and DF(z) are the discrete integrator formulas for the integrator and. C = pidstd( Kp , Ti ) creates a proportional and integral (PI) controller with Td = and . The PID Controller block output is a weighted sum of the input signal, the integral of the input signal, and the derivative of the input signal. The PID controller has parameters: gain, integral and derivative. I also get a lot of queries on the form of the controller equation used in this app – for a . When P controller is use large gain is needed to improve steady state error.
PI controller will eliminate forced oscillations and steady state error resulting in.